
-
智能(néng)制造示範産(chǎn)線(xiàn) 發布日期:2023-05-26
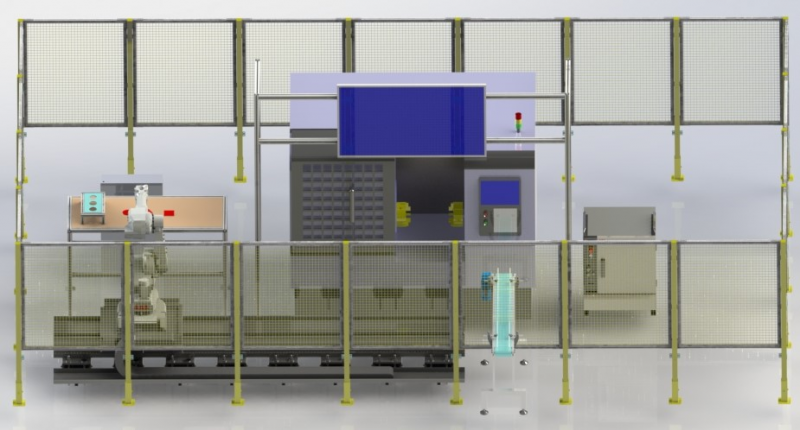
智能(néng)制造示範産(chǎn)線(xiàn) 發布日期:2023-05-26智能(néng)制造示範産(chǎn)線(xiàn) 分(fēn)為(wèi)六大模塊,分(fēn)别為(wèi)機械加工(gōng)模塊、智能(néng)倉儲模塊、智能(néng)化綜合應用(yòng)模塊、智能(néng)物(wù)流及實訓模塊、控制及展示系統模塊、數字孿生及教學(xué)實訓模塊;這些矩陣化模塊既可(kě)以作(zuò)為(wèi)獨立的單台設備進行實訓教學(xué),又(yòu)可(kě)以整體(tǐ)聯動成為(wèi)一條完整的生産(chǎn)加工(gōng)産(chǎn)線(xiàn)。 一、機械加工(gōng)模塊 主要功能(néng)是數控車(chē)床車(chē)削加工(gōng)、加工(gōng)中(zhōng)心複雜工(gōng)藝加工(gōng)。 該模塊主要包括數控車(chē)床、加工(gōng)中(zhōng)心、六軸工(gōng)業機器人、機器人第七軸、接駁台、機器人視覺系統、夾具(jù)快換系統、控制台、RFID系統、人機交互系統、展示看闆系統、防護裝(zhuāng)置、工(gōng)裝(zhuāng)夾具(jù)輔助物(wù)料等部分(fēn)。該模塊平面布局圖及效果圖如圖1、圖2、圖3、圖4所示。 該模塊工(gōng)藝流程如下。物(wù)流轉運系統将工(gōng)裝(zhuāng)載闆(帶毛坯)放置在接駁台,接駁台處的RFID系統讀取工(gōng)裝(zhuāng)載闆信息,接駁台将工(gōng)裝(zhuāng)載闆輸送至暫存位置。工(gōng)業機器人換取合适夾具(jù),在視覺系統輔助下将毛坯件放置數控車(chē)床内。數控車(chē)床加工(gōng)完畢後,再由工(gōng)業機器人取出物(wù)料,放回工(gōng)裝(zhuāng)載闆。接駁台将工(gōng)裝(zhuāng)載闆(帶半成品)輸送出該模塊。物(wù)流轉運系統将工(gōng)裝(zhuāng)載闆(帶半成品)輸送至其他(tā)模塊。接駁台處的RFID系統讀取載闆信息。 工(gōng)業機器人實訓台可(kě)用(yòng)于工(gōng)業機器人實訓,可(kě)以進行工(gōng)業機器人基本操作(zuò),基于視覺系統的機器人操作(zuò)。工(gōng)業機器人第七軸可(kě)以讓工(gōng)業機器人在兩個工(gōng)位間自由切換。展示看闆系統可(kě)以實時數控車(chē)床工(gōng)作(zuò)參數或數控車(chē)床實時加工(gōng)實況。 圖1 數控車(chē)床模塊平面布局圖 圖2 數控車(chē)床模塊布局圖 圖3 五軸加工(gōng)中(zhōng)心模塊平面布局圖 圖4 數控車(chē)床模塊布局圖 二、智能(néng)倉儲模塊 智能(néng)倉儲模塊主要功能(néng)是存儲加工(gōng)件毛坯與成品,可(kě)以實現自動、手動存取物(wù)料,還可(kě)以用(yòng)于三軸機械手實訓教學(xué),三軸機械手的數字孿生教學(xué)。 該模塊主要包括貨架、雙向貨叉堆垛機、進出庫平台、工(gōng)裝(zhuāng)載闆、RFID系統、智能(néng)倉儲控制系統、WMS倉儲管理(lǐ)系統、控制台、人機交互系統、展示看闆系統、防護裝(zhuāng)置等部分(fēn)。該模塊平面布局圖及效果圖如圖5、圖6所示。 該模塊工(gōng)藝流程如下。堆垛機将工(gōng)裝(zhuāng)載闆(帶毛坯)輸送至出庫平台,由物(wù)流轉運系統轉運,流入其他(tā)模塊。出庫平台的RFID系統讀取載闆信息。物(wù)流轉運系統将工(gōng)裝(zhuāng)載闆(帶成品)輸送至入庫平台,由堆垛機放置庫位上。入庫平台的RFID系統讀取載闆信息。 展示看闆系統可(kě)以實時展示庫位信息。 圖5 智能(néng)倉儲模塊平面布局圖 圖6 智能(néng)倉儲模塊布局圖 三、智能(néng)化綜合應用(yòng)模塊 智能(néng)化綜合應用(yòng)模塊主要功能(néng)是對加工(gōng)後的工(gōng)件進行檢測,并将不同的工(gōng)件進行裝(zhuāng)配,裝(zhuāng)配完成後的工(gōng)件進行激光打标,還可(kě)以用(yòng)于視覺檢測系統、協作(zuò)機器人、機器人力控系統等實訓教學(xué)。 該模塊主要包括協作(zuò)機器人、力控系統、機器人底座、接駁台、機器人視覺系統、夾具(jù)快換系統、控制台、RFID系統、激光打标系統、人機交互系統、展示看闆系統、防護裝(zhuāng)置、工(gōng)裝(zhuāng)夾具(jù)輔助物(wù)料等部分(fēn)。該模塊平面布局圖及效果圖如圖7、圖8所示。 該模塊工(gōng)藝流程如下。物(wù)流轉運系統将工(gōng)裝(zhuāng)載闆(帶成品)放置在接駁台,接駁台處的RFID系統讀取工(gōng)裝(zhuāng)載闆信息,接駁台将工(gōng)裝(zhuāng)載闆輸送至暫存位置。一号協作(zuò)機器人換取合适夾具(jù),在視覺系統輔助下将毛坯件放置檢測裝(zhuāng)置内。檢測完成後,再由一号協作(zuò)機器人取出物(wù)料,放在物(wù)料中(zhōng)轉台。再由二号裝(zhuāng)配協作(zuò)機器人,在力控系統輔助下,将工(gōng)件進行裝(zhuāng)配,裝(zhuāng)配完成後放置在激光打标處進行打标,完成後再放置回物(wù)料中(zhōng)轉台。再由一号協作(zuò)機器人将工(gōng)件放回工(gōng)裝(zhuāng)載闆。由接駁台将工(gōng)裝(zhuāng)載闆(帶成品)輸送出該模塊。物(wù)流轉運系統将工(gōng)裝(zhuāng)載闆(帶成品)輸送至其他(tā)模塊。接駁台處的RFID系統讀取載闆信息。 協作(zuò)機器人實訓台可(kě)用(yòng)于協作(zuò)機器人實訓,可(kě)以進行協作(zuò)機器人基本操作(zuò),基于力控系統的協作(zuò)機器人操作(zuò)。展示看闆系統可(kě)以展示檢測結果。 圖7智能(néng)綜合應用(yòng)模塊平面布局圖 圖8 智能(néng)綜合應用(yòng)模塊布局圖 四、總控及展示系統模塊 總控及展示系統模塊主要功能(néng)是對整條智能(néng)生産(chǎn)線(xiàn)進行整體(tǐ)控制,并将生産(chǎn)線(xiàn)的信息進行實時綜合展示。 該模塊主要包括總控系統、視頻監控系統、MES系統、電(diàn)子看闆系統、防護裝(zhuāng)置、網絡系統等部分(fēn)。該模塊平面布局圖及效果圖如圖9、圖10所示。 總控系統控制整體(tǐ)生産(chǎn)線(xiàn)的運行,展示系統可(kě)以展示生産(chǎn)線(xiàn)綜合信息,MES系統是總協調系統,視頻監控系統可(kě)實時展示數控車(chē)床及加工(gōng)中(zhōng)心内部工(gōng)作(zuò)情況。 圖9 總控及展示系統模塊平面布局圖 圖10 總控及展示系統模塊布局圖 五、智能(néng)物(wù)流及實訓模塊 智能(néng)物(wù)流及實訓模塊主要功能(néng)是用(yòng)于各模塊之間工(gōng)件的轉運,也可(kě)以用(yòng)于複合機器人的實訓。 該模塊主要包括複合機器人系統、調度系統、控制台、物(wù)流中(zhōng)轉台、防護裝(zhuāng)置等部分(fēn)。該模塊平面布局圖及效果圖如圖11、圖12所示。 控制系統控制該模塊的運行,調度系統控制兩台複合機器人的運動,物(wù)流中(zhōng)轉台用(yòng)于中(zhōng)轉站點,用(yòng)于實訓。 圖11 智能(néng)物(wù)流及實訓模塊平面布局圖 圖12 智能(néng)物(wù)流及實訓模塊布局圖 六、數字孿生及教學(xué)實訓模塊 數字孿生及教學(xué)實訓模塊主要功能(néng)是進行數字孿生教學(xué)及實訓。 該模塊主要包括數字孿生軟件、學(xué)生桌椅、二聯顯示屏、服務(wù)器、計算機及顯示器、教學(xué)培訓課程、防護裝(zhuāng)置等部分(fēn)。該模塊平面布局圖及效果圖如圖13、圖14所示。 圖13 數字孿生及教學(xué)實訓模塊平面布局圖 圖14 數字孿生及教學(xué)實訓模塊布局圖
-

中(zhōng)國(guó)制造2025 推進,機器換人成為(wèi)大勢所趨 發布日期:2023-05-10
中(zhōng)國(guó)制造2025 推進,機器換人成為(wèi)大勢所趨 發布日期:2023-05-10随着“中(zhōng)國(guó)制造2025”的推進,“機器換人”成為(wèi)大勢所趨,這也使得中(zhōng)國(guó)機器人連續四年蟬聯銷售量高。各地紛紛把機器人産(chǎn)業放在優先發展的。 美國(guó)國(guó)際數據公(gōng)司近日發布的報告顯示,中(zhōng)國(guó)(内地)仍将是世界大和發展快的機器人技(jì )術市場,在機器人技(jì )術方面的支出将占全球支出的30%以上。預計中(zhōng)國(guó)在2020 年的機器人技(jì )術支出将達到594 億美元,比2016 年的246 億美元的估算支出增加一倍以上。 而與這“火熱度”形成鮮明對照的是,在中(zhōng)國(guó)龐大的機器人消費市場中(zhōng),本土品牌機器人僅占4%,國(guó)産(chǎn)機器量關鍵零部件依靠進口。 目前,全國(guó)已建成和在建的機器人産(chǎn)業園區(qū)超過了40 個,機器人企業的數量超過了800 家。但實際情況卻是這800 多(duō)家企業裏面,将近一半企業是沒有(yǒu)産(chǎn)品的空牌子,剩下的一半企業裏将近70%-80%是在代理(lǐ)别人的産(chǎn)品,真正能(néng)自己生産(chǎn)零部件或機器人産(chǎn)品的僅100 家左右。雖然數量可(kě)觀,但在行業内有(yǒu)影響力的企業幾乎沒有(yǒu),行業發展散亂。整個産(chǎn)業鏈呈現出“下遊龐大,中(zhōng)遊分(fēn)散,上遊缺失”的特點。 另外,國(guó)内沿海城市紛紛推崇“機器換人”的思想,雖然機器人暫時提升了傳統制造業,卻又(yòu)誕生了一大批新(xīn)的傳統機器人企業,三五年之後将再次面臨新(xīn)的産(chǎn)業轉型升級壓力。 “機器換人”計劃沒有(yǒu)将機器人的市場需求與産(chǎn)業培育有(yǒu)效結合,這大大了中(zhōng)國(guó)機器人的産(chǎn)業發展。 因此,事實上,在整個中(zhōng)國(guó)機器人産(chǎn)業繁華的背後,大部分(fēn)國(guó)内機器人企業還是在低端掙紮。而之所以中(zhōng)國(guó)工(gōng)業機器人市場被國(guó)際巨頭占據,其中(zhōng)很(hěn)重要的原因就是減速器、伺服電(diàn)機、控制器等核心零部件“受制于人”,大多(duō)依靠進口,從而使得國(guó)産(chǎn)品牌機器人成本相比國(guó)外品牌機器人并無多(duō)大優勢。 就當前市場來看,國(guó)内機器人企業的産(chǎn)品主要是以直角坐(zuò)标機器人為(wèi)主,處在産(chǎn)業中(zhōng)低端,創新(xīn)以及生産(chǎn)應用(yòng)水平與國(guó)際先進企業差距太大。強烈的反差也無時無刻不在提醒我們核心技(jì )術與關鍵零部件與發達國(guó)家的差距依然很(hěn)大。發展工(gōng)業機器人突破機器人核心零部件技(jì )術這一關鍵難題。 在行業布局方面,被譽為(wèi)“制造業皇冠頂端的明珠”的機器人,自然也會是其他(tā)所青睐的對象。當前,不少國(guó)際機器人企業已準備和中(zhōng)國(guó)企業合作(zuò)在中(zhōng)國(guó)設立生産(chǎn),為(wèi)即将到來的機器人需求大幅增長(cháng)提前布局。如果國(guó)産(chǎn)企業不在核心技(jì )術上突破,很(hěn)可(kě)能(néng)出現“中(zhōng)國(guó)的扶持政策,火了國(guó)外的企業”。更讓人擔心的是,弱、小(xiǎo)、散企業叢生,會不會讓新(xīn)興的機器人産(chǎn)業在高歌猛進中(zhōng)快速跌入低端産(chǎn)能(néng)過剩的魔咒? 若僅憑同質(zhì)化低端擴張,而不追求高端突破,國(guó)産(chǎn)機器人産(chǎn)業和應用(yòng)的未來都可(kě)能(néng)困境。對此,工(gōng)業和信息化部裝(zhuāng)備工(gōng)業司司長(cháng)李東提醒,發展機器人産(chǎn)業,不是要追“風口”,而是要攻“關口”,選準産(chǎn)業的瓶頸進行突破。盡管機器人産(chǎn)業很(hěn)熱,但在發展時一定要保持冷靜的頭腦。 (來源:高工(gōng)機器人網)
-

機器人發展的3 大趨勢、7 大路徑、4 大障礙 發布日期:2023-05-10
機器人發展的3 大趨勢、7 大路徑、4 大障礙 發布日期:2023-05-10機器人發展的三大趨勢: 一是軟硬融合。機器人軟件比硬件更為(wèi)重要,因為(wèi)人工(gōng)智能(néng)技(jì )術體(tǐ)現在軟件上,數字化車(chē)間的軌迹規劃、車(chē)間布局、自動化上料都需要軟硬件相結合。因此,機器人行業的人才既要懂機械技(jì )術,又(yòu)要懂信息技(jì )術,尤其是機器人的控制技(jì )術。二是虛實融合。通過大量仿真、虛拟現實,能(néng)夠把虛拟現實與車(chē)間的實際加工(gōng)過程有(yǒu)機結合起來。三是人機融合。人、機器和機器人這三者如何有(yǒu)機融合值得業界的深入思考。 機器人發展的七大路徑: 1,從串聯機器人到串并混聯的機器人。早的機器人以串聯居多(duō),随着市場的發展既要用(yòng)到串聯的又(yòu)要用(yòng)到并聯的機器人。串并混聯機器人同時具(jù)備并聯結構的剛性強和串聯結構的控制空間大的優點。2,從剛體(tǐ)機器人到剛柔體(tǐ)機器人。通過柔體(tǐ)機器人的末端或者本體(tǐ)實現可(kě)達性和靈活性,利用(yòng)柔性機器人可(kě)以在航空構建上解決鑽孔和打孔的難題。3,從單機器人作(zuò)業到多(duō)機器人協同工(gōng)作(zuò)。在制造空間的分(fēn)布性、功能(néng)的分(fēn)布性、任務(wù)的并行性,以及任務(wù)作(zuò)業的融觸性受到制約,構建數字化車(chē)間或智能(néng)化車(chē)間的空間是有(yǒu)限的,并涉及到執行任務(wù)的先後時序問題,因此憑借單台機器人是不能(néng)達到目的的。4,機器人技(jì )術與物(wù)聯網技(jì )術相結合。通過工(gōng)業機器人和物(wù)聯網的結合,催生出智能(néng)柔性的自動化裝(zhuāng)配焊接。通過物(wù)聯網,工(gōng)業機器人具(jù)有(yǒu)感知的能(néng)力,也就是具(jù)有(yǒu)了視覺、觸覺,能(néng)夠實時采集生産(chǎn)過程中(zhōng)的各種數據。5,虛拟現實結合。虛拟現實結合系統可(kě)以降低對機器人依賴,降低生産(chǎn)成本,提效率高,進一步消除機器人的隐患。通過虛拟現實的模拟,機器人的每一個軌迹和位置,都能(néng)在使用(yòng)者的預料和控制當中(zhōng),防止出現意外。6,機器人技(jì )術與模式識别技(jì )術的結合。模式識别用(yòng)于機器人的檢測特别有(yǒu)效,機器人在加工(gōng)零件時,能(néng)夠檢查出有(yǒu)沒有(yǒu)質(zhì)量的瑕疵、不符合的技(jì )術條件等。7,機器人技(jì )術與人工(gōng)智能(néng)的結合。機器人與人工(gōng)智能(néng)相結合後,機器人将不再被固定在圍欄内,而是人機協同與人機融合。這是機器人本質(zhì)的特征,但是真正要做到這一點,難度還很(hěn)大。 推廣機器人的四大障礙: 1,三個密集型制造模式。三個密集型指勞動力密集型、資源密集型和污染密集型。改革開放三十年以來,制造業取得了很(hěn)大的發展的同時,制造業也存在很(hěn)大的問題。2,仿制為(wèi)主的技(jì )術路線(xiàn)。改革開放以來,浙江、江蘇、廣東、山(shān)東沿海經濟發展比較快,但是大部分(fēn)企業的産(chǎn)品都是仿制為(wèi)主。在經濟短缺的時候,塊狀經濟起了很(hěn)大的作(zuò)用(yòng),解決東西短缺的問題。但是現在市場經濟成熟了,幾乎每個行業都有(yǒu)出現了産(chǎn)能(néng)過剩的問題。3,低價競争的營銷策略。很(hěn)多(duō)企業低價格作(zuò)為(wèi)大優點,性能(néng)價格好就是賣得便宜。例如,這個産(chǎn)品遵循仿制為(wèi)主的技(jì )術路線(xiàn),當産(chǎn)品生産(chǎn)出來可(kě)以賣100 塊時,過了半年,旁邊一個廠生産(chǎn)出來就可(kě)以賣80 塊,再過半年另一個廠生産(chǎn)出來賣60 塊,等到賣60 塊的時候誰都沒有(yǒu)錢賺。制造業存在的困難很(hěn)大程度是低價競争的營銷策略造成的。4,粗放型車(chē)間管理(lǐ)。很(hěn)多(duō)企業還屬于粗放型的管理(lǐ)方式,用(yòng)機器人根本解決不了問題。這不是機器人的問題,是精(jīng)益生産(chǎn)的問題。 (來源:新(xīn)戰略機器人網)
-

杭州認知首創國(guó)内人工(gōng)智能(néng)醫(yī)療領域應用(yòng)新(xīn)模式 發布日期:2023-05-10
杭州認知首創國(guó)内人工(gōng)智能(néng)醫(yī)療領域應用(yòng)新(xīn)模式 發布日期:2023-05-10杭州認知攜手Watson,首創國(guó)内多(duō)項人工(gōng)智能(néng)在腫瘤診療領域的應用(yòng)模式,沃森進入中(zhōng)國(guó)屆滿一年,作(zuò)為(wèi)Watson 在中(zhōng)國(guó)核心戰略夥伴,杭州認知一年内完成多(duō)項全國(guó)首例的成就,并且杭州認知沃森智能(néng)應用(yòng)雲平台迅速落地全國(guó),敲開人工(gōng)智能(néng)輔助診療勢不可(kě)擋的未來。 杭州認知在IBM Watson 的基礎上進行深度開發,打造沃森智能(néng)應用(yòng)雲平台,逐步整合沃森全産(chǎn)品線(xiàn),并根據國(guó)内醫(yī)院不同的診療需求進行定制化調适,以符合國(guó)内醫(yī)院實際臨床應用(yòng),此平台在5 月18 日中(zhōng)國(guó)衛生信息技(jì )術交流大會中(zhōng)亮相,即受到國(guó)家衛計委領導金小(xiǎo)桃主任的關注與指導,成為(wèi)大會中(zhōng)受矚目的人工(gōng)智能(néng)醫(yī)療産(chǎn)品之一。身為(wèi)國(guó)内人工(gōng)智能(néng)輔助診療企業,杭州認知在一年之内創造出多(duō)項全國(guó)首創的合作(zuò)項目,成為(wèi)國(guó)内發展人智能(néng)醫(yī)療應用(yòng)的基礎。 (來源:中(zhōng)國(guó)機器人網)
-
AGV 機器人市場新(xīn)填玩伴 SESTO Robotics 正式進軍中(zhōng)國(guó)市場 發布日期:2023-05-10
新(xīn)加坡HOPE Technik 集團下轄子公(gōng)司賽思托機器人(SESTO Robotics)在廣州設立中(zhōng)國(guó)辦(bàn)事處,宣告正式進軍中(zhōng)國(guó)市場。賽思托機器人是自主機器人研發領域中(zhōng)全球企業,緻力于為(wèi)全球客戶和合作(zuò)夥伴提供移動機器人解決方案。中(zhōng)國(guó)正處于由一個制造業大國(guó)邁向制造業強國(guó)的過程之中(zhōng),其中(zhōng)許多(duō)企業也開始積極探讨采用(yòng)創新(xīn)科(kē)技(jì )和智能(néng)技(jì )術以配合這個趨勢。我司的自動導引車(chē)(簡稱AGV)産(chǎn)品是基于工(gōng)業4.0 和中(zhōng)國(guó)智造2025 戰略研發的新(xīn)一代産(chǎn)品,是有(yǒu)效提升自動化和智能(néng)化生産(chǎn)的智能(néng)裝(zhuāng)備,從而提高個别企業的生産(chǎn)率,并達到新(xīn)經濟的目标。 (來源:中(zhōng)國(guó)傳動網)
-

華為(wèi)與Festo 簽署基于5G 切片網絡的 雲化機器人合作(zuò)備忘錄 發布日期:2023-05-10
華為(wèi)與Festo 簽署基于5G 切片網絡的 雲化機器人合作(zuò)備忘錄 發布日期:2023-05-10近日,華為(wèi)與Festo 簽署合作(zuò)備忘錄,共同研究基于5G 切片網絡的雲化機器人在智能(néng)制造領域的應用(yòng),推動制造行業數字化轉型。 基于該合作(zuò)備忘錄,雙方将主要就“機器人即服務(wù)”(RaaS,Robot as a service)理(lǐ)念的5G 雲化機器人進行測試,進一步探索5G 雲化機器人在制造業數字化轉型過程中(zhōng)的增值應用(yòng),進而實現智能(néng)工(gōng)廠大規模定制化生産(chǎn)。基于該理(lǐ)念,機器人的數據處理(lǐ)功能(néng)将從機器人端遷移到制造雲,同時因為(wèi)機器人的控制環路對時延有(yǒu)很(hěn)高的要求,所以通過5G 超低時延網絡連接機器人和制造雲。 5G 雲化機器人項目通過5G uRLLC(超高可(kě)靠和低時延通信)切片網絡,針對雲化機器人閉環控制系統的高可(kě)靠性和實時性的滿足度進行測試。本次測試使用(yòng)的移動機器人系統由具(jù)有(yǒu)六個自由度的機器手臂和制造雲組成。機器人的軌迹信息和控制數據在制造雲中(zhōng)處理(lǐ)有(yǒu)助于系統計算能(néng)力的擴展和機器人平台的節能(néng)。 RaaS 與制造雲的結合意味着将工(gōng)業機器人的基本功能(néng)與高性能(néng)的計算系統進行解耦,5G 切片網絡使能(néng)了這一應用(yòng)場景。5G 網絡切片技(jì )術不僅可(kě)以保證不同業務(wù)相應的服務(wù)等級,而且可(kě)以通過動态分(fēn)配服務(wù)質(zhì)量來使能(néng)柔性的工(gōng)程解決方案。 華為(wèi)5G 産(chǎn)品線(xiàn)總裁楊超斌表示:“移動通信網絡正在飛速發展和演進,并且逐漸滲透到多(duō)種垂直行業。5G 網絡通過切片技(jì )術将滿足行業多(duō)樣化的網絡需求,使能(néng)更多(duō)垂直行業應用(yòng)。華為(wèi)作(zuò)為(wèi)無線(xiàn)網絡解決方案的供應商(shāng),将與産(chǎn)業夥伴共同探索新(xīn)應用(yòng),為(wèi)産(chǎn)業創造更大的價值。我們希望通過與Festo 的合作(zuò)共同促進智能(néng)制造産(chǎn)業的發展。” (來源:高工(gōng)機器人網)
